随着航天科技的不断发展,目前航天器正向复杂化、大型化发展,以实现更高质量的航天任务。复杂航天器大尺寸、大柔性等特点使其轨道、姿态动力学特性更为复杂,因此,通过对控制系统的合理设计,实现对复杂航天器高精度、高稳定性的轨道和姿态指向控制能力,是未来航天任务的重要技术保障。
本课程以复杂航天器的设计方法为研究对象,重点介绍轨道和姿态运动控制的基本原理及控制系统的设计思想和设计方法。课程设有四个章节,包括航天器轨道测量与轨道确定,航天器轨道控制,航天器姿态控制,航天器姿态测量与姿态确定。
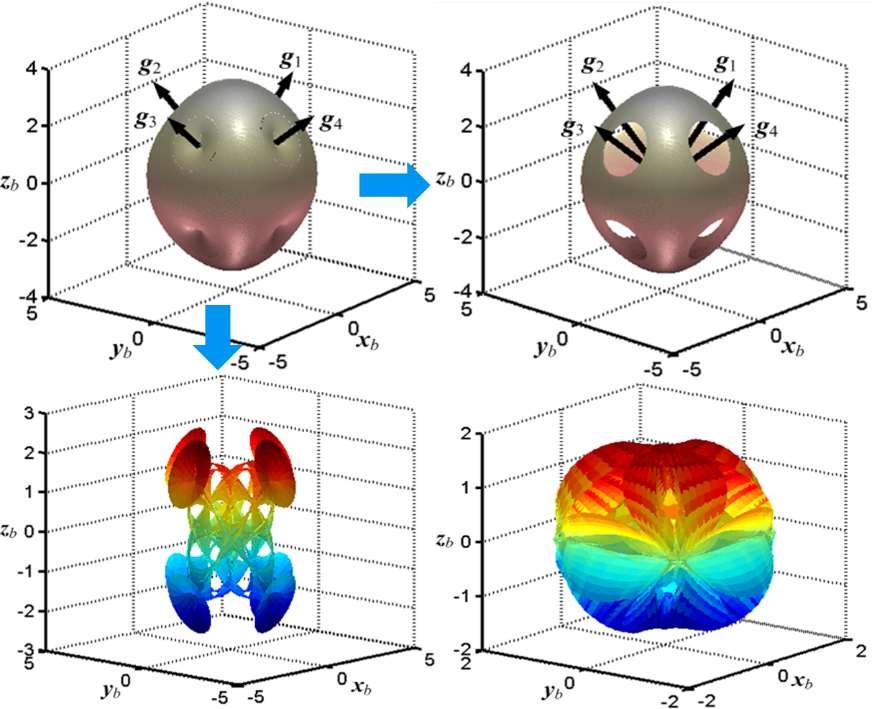
图 1 控制力矩陀螺的构型分析
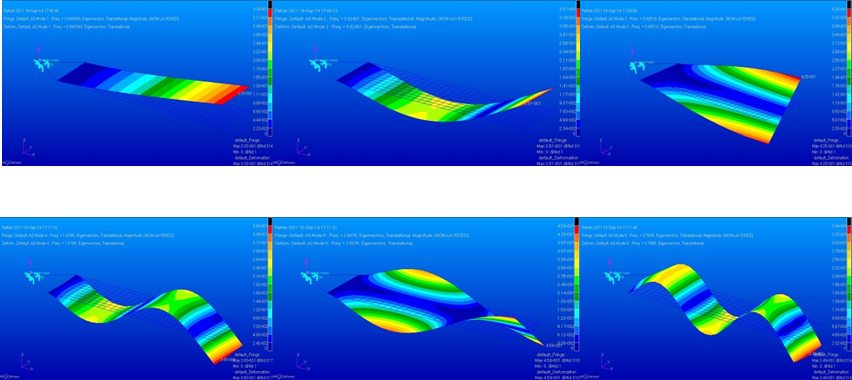
图 2 带有挠性附件的航天器动力学模型
本课程结合比较具体的航天器任务要求,侧重于讲解复杂航天器的轨道确定方法和轨道控制系统设计,以及用多体系统表征的复杂航天器的姿态测量、确定与控制系统设计方法。通过本课程的学习,员工将能够对航天器进行动力学建模分析、设计递归估计轨道改进方法、姿态镇定和跟踪控制律、对复杂的轨道和姿态进行控制设计。同时,本课程将提升员工对航天器系统的数学建模和控制设计能力,使员工具备独立开展航天器控制系统综合分析和性能评估、数值仿真等基本素养,为员工后继进入相关工作岗位或开展课题研究奠定基础。

